Arduino: Acionamento de Cargas e Motores: mudanças entre as edições
| Linha 64: | Linha 64: | ||
;Módulo Ponte H L9110S: | ;Módulo Ponte H L9110S: | ||
:[[Arquivo:PonteH_L9110S. | :[[Arquivo:PonteH_L9110S.jpeg|250px]] | ||
==Referências== | ==Referências== | ||
Edição das 14h32min de 3 de outubro de 2021
Arduíno: Controle de Atuadores
O Arduíno pode controlar atuadores através de pinos de saída digitais e pinos com saídas PWM.
Informações sobre Arduíno
Acionamento de Cargas com Relés
Um relé é um interruptor eletromecânico ou eletrônico que pode ser utilizado para ligar ou desligar cargas conectadas em 127/220V CA.
O acionamento do relé pelo Arduíno é realizado a partir de uma saída digital, além do fornecimento das tensões 5V e GNG para alimentar o relé.

A carga CA é conectada nos terminais de potência do relé, o qual geralmente apresenta três terminais:
- NA - Normalmente Aberto
- COM - Comum
- NF - Normalmente Fechado
Para acionamento de uma carga simples, como uma lâmpada, utilizar NA-COM como chave liga-desliga.
Laboratório 1: Acionamento de uma lâmpada com relé
- LDR e relé
- Montar hardware com sensor LDR e um relé para acionamento pelo Arduíno de uma lâmpada 127/220V.
- O circuito da lâmpada na rede 127/220 V CA é mostrado na figura abaixo.

Servo Motor
Os servo motores são atuadores utilizados em aplicações onde é necessário fazer o controle de movimento com posicionamento preciso, por exemplo, para controlar um braço de um robô ou o ângulo de abertura de uma chave.
- Micro Servo motor SG90


- O SG90 tem três fios: alimentação (5 V) na cor vermelho, terra (GND) na cor marrom e o sinal na cor laranja para controle do servo motor.
- O controle do servo motor é realizado por uma saída digital PWM, que permite movimentar o braço do servo de 0o a 180o. O controle do ângulo é realizado pela largura do pulso PWM (duty cicle), variando entre 1 - 2 ms, para um período de 20 ms (50 Hz).
- Para uso com o Arduíno usa-se a biblioteca servo.h, que permite controlar diversos tipos de servo motores.
Laboratório 2: Controle de servo motor
- Servo motor SG90 e potenciômetro
- Montar hardware conectado a um Arduíno, com servo motor com o sinal conectado a saída digital 9 (PWM) e um potenciômetro com o pino central conectado a entrada analógica A0 para controlar o servo motor.
- Carregar programa exemplo Arquivo/Exemplos/Servo/Knob para controle do servo motor a partir do potenciômetro.
- Verifique a utilização pelo programa da biblioteca <Servo.h>.
Controle de Motores com ponte H
A ponte H é um arranjo de chaves em forma de H, que serve para inverter o sentido da corrente elétrica em motores de corrente contínua, motores de passo ou outras cargas indutivas, permitindo com isto inverter o sentido de rotação do motor.

O funcionamento da ponte H é baseado na operação combinada de quatro as chaves. Se S1 e S4 estiverem fechadas e S2 e S3 abertas tem-se o motor rodando em um sentido. Já com as chaves S3 e S2 fechadas e S1 e S4 abertas, o sentido do fluxo da corrente sobre o motor é invertido, fazendo com que a rotação do motor também se inverta.
A velocidade de rotação do motor, por outro lado, pode ser controlada variando o nível da tensão contínua aplicada sobre o motor.
Circuitos integrados e módulos ponte H
Existem circuitos integrados monolíticos, de diferentes fabricantes, que implementam pontes H através de chaves transistorizadas, como o L298 e o L9110S.
Também existem diversos módulos que utilizam circuitos integrados ponte H e oferecem uma plataforma pronta para prototipagem, incluindo terminais de conexão para as cargas e pinos para conexão dos sinais de controle.
- Módulo Ponte H L298N
- Permite controlar até dois motores de corrente contínua e pode ser comandado por microcontroladores como o Arduíno.
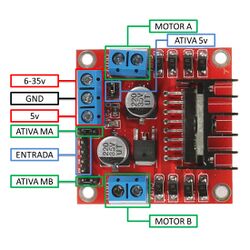 [1]
[1]- A referência FelipeFlop. Motor DC com Driver Ponte H L298N apresenta uma descrição detalhada deste módulo e a forma de utilização com o Arduíno.

- Módulo Ponte H L9110S


Referências
- ↑ FelipeFlop. Motor DC com Driver Ponte H L298N, 2013. https://www.filipeflop.com/blog/motor-dc-arduino-ponte-h-l298n/
Evandro.cantu (discussão) 09h35min de 17 de setembro de 2021 (-03)